Video đầu tiên về dây cáp đã trình bày cách tạo và sửa đổi dây cáp. Bạn cũng đã thấy các tùy chọn về cách cải thiện góc nhìn và hành vi thực tế của chúng, cũng như cách thiết lập các tham số biến dạng để tránh làm hỏng dây cáp. Bạn có thể thêm các loại điểm neo khác nhau để tối ưu hóa việc định vị cáp sao cho giống với cáp tại nơi làm việc một cách thực tế.
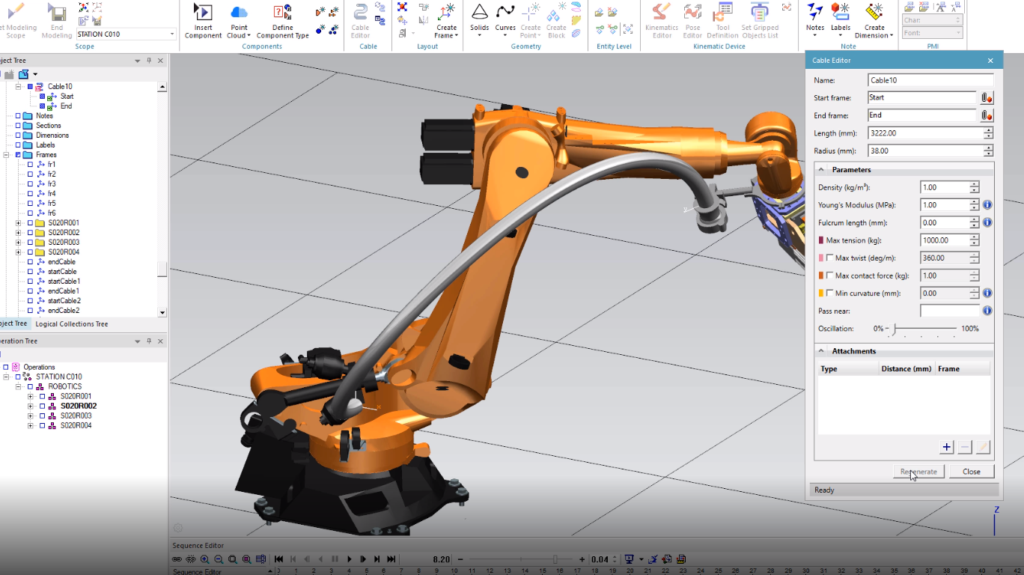
Process Simulate cung cấp nhiều loại điểm neo cố định, xoay và rút lại. Hãy mở trình chỉnh sửa cáp và mở rộng phần attachments. Nhấp vào “add attachment.” Danh sách các loại điểm neo chứa một số tùy chọn. Đầu tiên, chúng ta sẽ sử dụng loại cố định. Chọn tọa độ mà bạn đã chuẩn bị sẵn ở vị trí mong muốn trên robot. Đảm bảo rằng trục Z được căn chỉnh chính xác song song với robot và hướng vào tọa độ cuối. Đưa ra một giá trị cho khoảng cách từ điểm bắt đầu của cáp. Điều này đặt độ dài của cáp giữa tọa độ bắt đầu và điểm neo mà bạn đang tạo. Bạn có thể xem thông tin và hoạt ảnh trước. Một điểm neo cố định sẽ cố định cáp tại điểm đó.
Nhấp vào “Regenerate” để buộc chặt cáp. Chiều dài còn lại của cáp tiếp tục từ điểm neo đến tọa độ cuối. Bạn có thể thêm một điểm neo cố định khác nếu cần. Nhấp vào “Ok” và “Regenerate”.
Nếu bạn muốn thêm điểm neo xoay, hãy thiết lập type thành “Rotating”. Bạn có thể chọn trục xoay, X hoặc Y và xem bản xem trước cho từng trục. Chọn tọa độ và thiết lập khoảng cách. Có ba loại hệ thống rút cáp trong Process Simulate. Chúng sử dụng cơ chế lò xo để kéo dài hoặc rút lại cáp theo yêu cầu của robot. Trong khi nó di chuyển trên không gian lắp ráp cho mỗi hệ thống rút lại, bạn có thể thấy một hoạt ảnh động xem trước ngắn như đã thấy ở đây cho loại một và loại hai.
Tiếp đến là hệ thống rút lại loại ba. Chọn tọa độ bạn đã chuẩn bị ở vị trí mong muốn trên robot và đưa ra giá trị cho khoảng cách khi bắt đầu cáp. Bạn có thể thiết lập hằng số cho lò xo hồi vị để xác định mức lực cản của nó. Nếu cần, hãy định cấu hình các chân rút lại tối thiểu và tối đa để điều chỉnh phạm vi tiếp cận của cáp. Bạn có thể xem trước hoạt ảnh động. Nếu cần, bạn có thể di chuyển tọa độ neo dọc theo trục Y ra khỏi robot để nhường chỗ cho cáp theo bán kính của cáp. Bây giờ hãy nhấp vào “Regenerate” để gắn cáp vào hệ thống rút lại. Bạn chỉ có thể sử dụng một hệ thống rút lại cho mỗi cáp. Process Simulate cung cấp cho bạn khả năng mô phỏng và tối ưu hóa hoạt động của cáp sao cho chúng giống với cáp ngoài đời thực và xác thực rằng chúng sẽ không bị hỏng hoặc bị hao mòn quá mức trong quá trình sản xuất.
Tecnomatix Process Simulate thuộc danh mục sản xuất kỹ thuật số của Siemens Digital Industries Software – Công ty hàng đầu về cung cấp phần mềm và dịch vụ trong lĩnh vực số hóa công nghiệp.
Vietbay CAD/CAM/CAE/PLM Team
Phone/Viber/Zalo/Whatsapp: 091 929 5520
Email: [email protected]
Website: www.vietbay.com.vn * www.cadcamcae.vn * www.vietbay.edu.vn