This video demonstrates how Process Simulate software users can create additional attachments for their cables, in addition to the compulsory start and end fixtures. Process Simulate provides a variety of realistic attachments allowing users to fix them to additional locations on the robot or on external surfaces. They can also create a rotating fixture for their cables, as well as three different spring-based retracting systems.
In the first video about cables, we demonstrated how to create cables and modify them. You also saw options about how to enhance their realistic look and behavior, and to set up deformation parameters to avoid damaging your cables. In this demo we will show how to create additional attachments for the cable. You can add different types of attachments to optimize the positioning of your cable to realistically resemble cables at work.
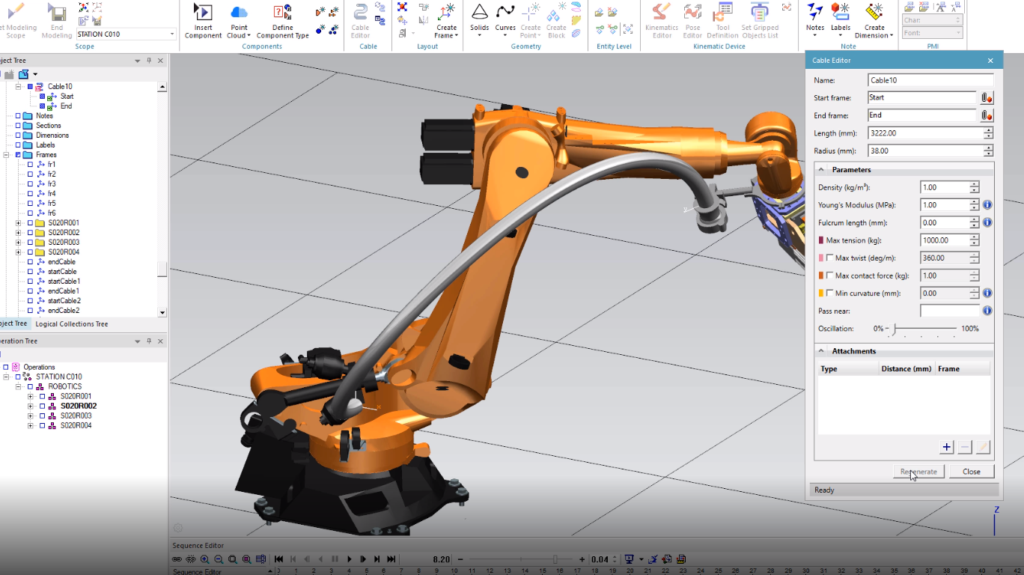
Process Simulate offers a variety of attachments fixed, rotating, and retracting. Let’s open the cable editor and expand the attachments section. Click “add attachment.” The list of types of attachments contains several options. First, we will use the fixed type. Pick the frame that you have already prepared at the desired position on the robot. Make sure that the Z axis is correctly aligned parallel to the robot and pointing to the end frame. Give a value for the distance from the start of the cable. This sets the length of the cable between its start frame and the attachment you are creating. You can view the informative preview animation. A fixed attachment fastens the cable in place at that point.
Click “regenerate” to fasten the cable. The remaining length of cable continues from the attachment to the end frame. You can add another fixed attachment if needed. Click “ok” and “regenerate.”
If you want to add a rotating attachment, set the type to “rotating.” You can select the rotation axis, either X or Y and see the preview for each. Select the frame and set the distance. There are three types of cable retracting systems in Process Simulate. They use a spring mechanism to extend or retract the cable as the robot requires. While it moves on the assembly space for each retracting system you can see a short preview animation as seen here for type one and for type two.
Now we will demonstrate the type three retracting system. Pick the frame you already prepared at the desired position at the robot and give a value for the distance at the start of the cable. You can set the constant for the retraction spring to determine its level of resistance. If needed, configure the minimum and maximum retracted legs to regulate the reach of the cable. You can review the informative preview animation. If necessary, you can move the attachment frame along the Y axis away from the robot, to make room for the cable according to the cable’s radius. Now click “regenerate” to attach the cable to the retracting system. You may only use one retracting system per cable. Process Simulate gives you the power to simulate and optimize cables behavior so that they resemble real-life cables and validate that they won’t be damaged or experience excessive wear and tear during manufacturing.
Vietbay CAD/CAM/CAE/PLM Team
Phone/Zalo/Whatsapp: 091 929 5520
Email: [email protected]
Website: www.vietbay.com.vn * www.cadcamcae.vn * www.vietbay.edu.vn